×1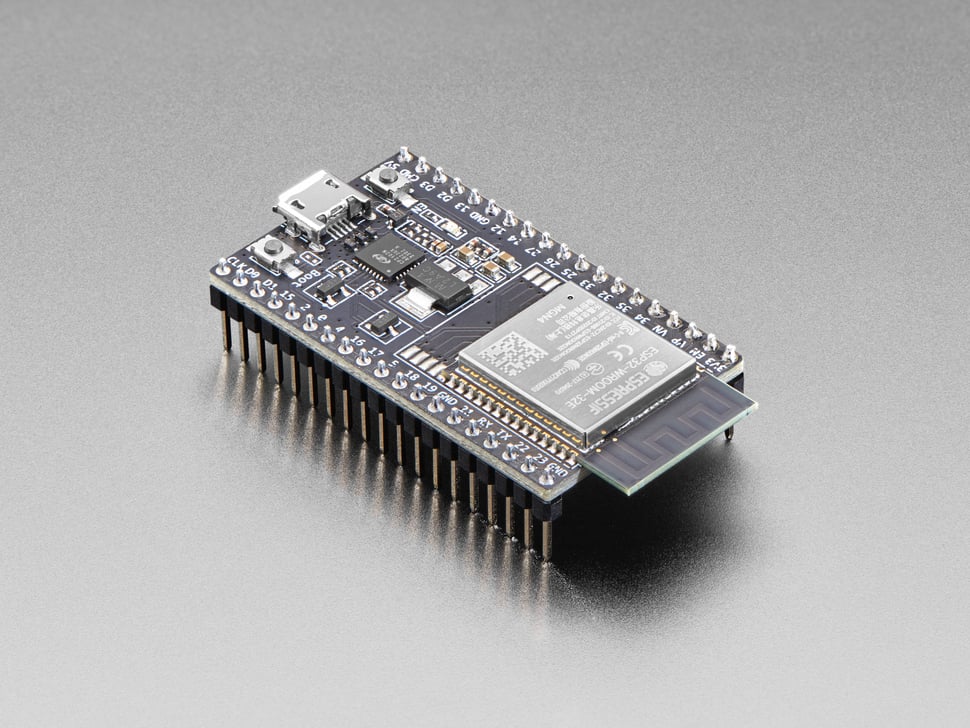
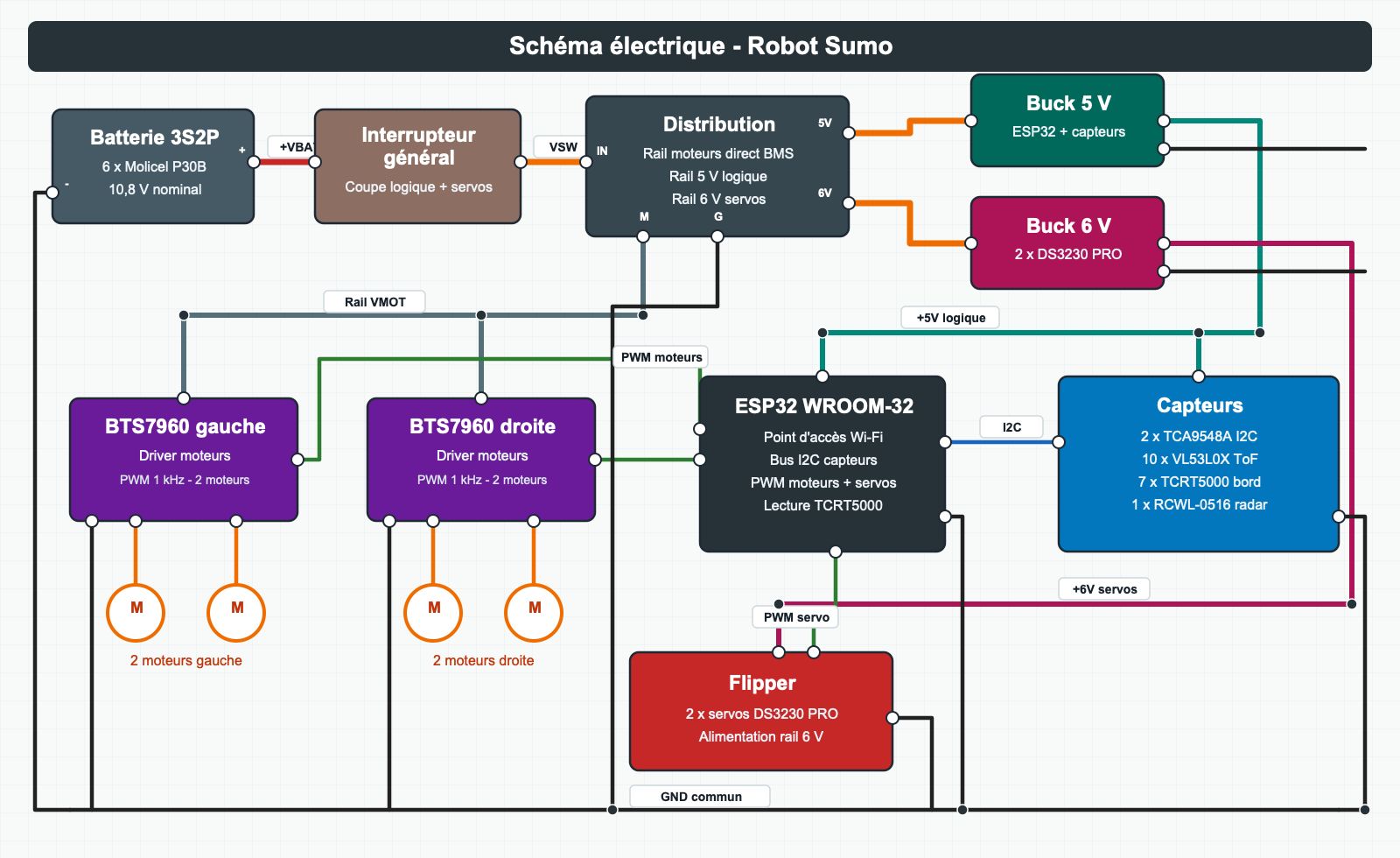
Le cerveau
ESP32 WROOM-32
C'est quoi ?Le petit ordinateur qui dirige tout le robot. Pièce imposée par le règlement.
Comment ça marche ?Au démarrage, il crée son propre Wi-Fi « RobotSumo ». Le téléphone s'y connecte et affiche la page de pilotage. Le cerveau lit les capteurs, écoute le joystick, et commande moteurs et servos.